第二章 图像局部描述符
这一章主要介绍两种非常典型的、不同的图像描述子,这两种图像描述子的使用将贯穿于本书,并且作为重要的局部特征,它们应用到了很多应用领域,比如创建全景图、增强现实、3维重建等。
2.1 Harris角点检测
Harris角点检测算法是最简单的角点检测方法之一。关于harris算法的原理,可以参阅本书中译本。下面是harris角点检测实例代码。
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
"""
Example of detecting Harris corner points (Figure 2-1 in the book).
"""
# 读入图像
im = array(Image.open('../data/empire.jpg').convert('L'))
# 检测harris角点
harrisim = harris.compute_harris_response(im)
# Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()
#画出Harris响应图
subplot(141)
imshow(harrisim1)
print harrisim1.shape
axis('off')
axis('equal')
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = harris.get_harris_points(harrisim, 6, thres)
subplot(1, 4, i+2)
imshow(im)
print im.shape
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
#原书采用的PCV中PCV harris模块
#harris.plot_harris_points(im, filtered_coords)
# plot only 200 strongest
# harris.plot_harris_points(im, filtered_coords[:200])
show()
运行上面代码,可得原书P32页的图:
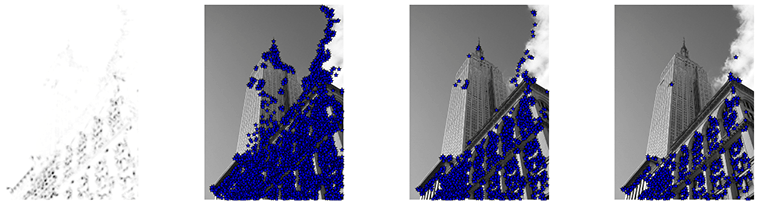 在上面代码中,先代开一幅图像,将其转换成灰度图像,然后计算相响应函数,通过响应值选择角点。最后,将这些检测的角点在原图上显示出来。如果你想对角点检测方法做一个概览,包括想对Harris检测器做些提高或改进,可以参阅WIKI中的例子WIKI.
在上面代码中,先代开一幅图像,将其转换成灰度图像,然后计算相响应函数,通过响应值选择角点。最后,将这些检测的角点在原图上显示出来。如果你想对角点检测方法做一个概览,包括想对Harris检测器做些提高或改进,可以参阅WIKI中的例子WIKI.
2.1.2 在图像间寻找对应点
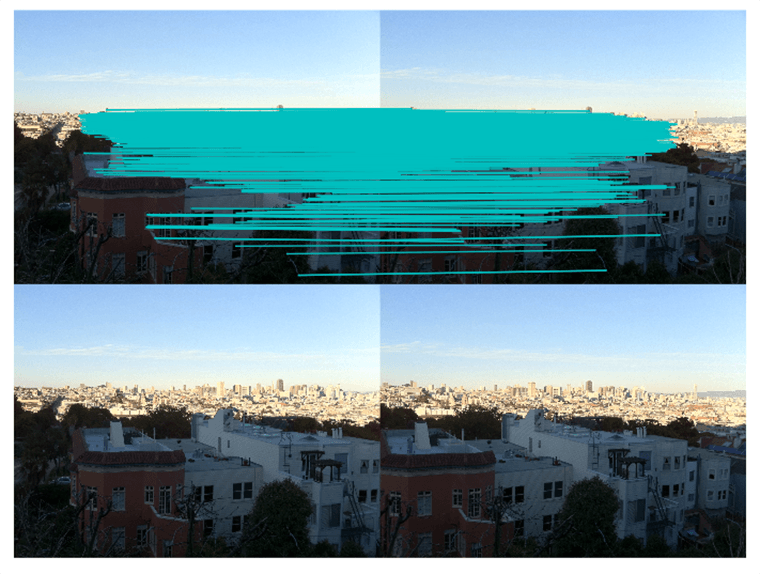
Harris角点检测器可以给出图像中检测到兴趣点,但它并没有提供在图像间对兴趣点进行比较的方法,我们需要在每个角点添加描述子,以及对这些描述子进行比较。关于兴趣点描述子,见本书中译本。下面再现原书P35页中的结果:
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
from PCV.tools.imtools import imresize
"""
This is the Harris point matching example in Figure 2-2.
"""
# Figure 2-2上面的图
#im1 = array(Image.open("../data/crans_1_small.jpg").convert("L"))
#im2= array(Image.open("../data/crans_2_small.jpg").convert("L"))
# Figure 2-2下面的图
im1 = array(Image.open("../data/sf_view1.jpg").convert("L"))
im2 = array(Image.open("../data/sf_view2.jpg").convert("L"))
# resize加快匹配速度
im1 = imresize(im1, (im1.shape[1]/2, im1.shape[0]/2))
im2 = imresize(im2, (im2.shape[1]/2, im2.shape[0]/2))
wid = 5
harrisim = harris.compute_harris_response(im1, 5)
filtered_coords1 = harris.get_harris_points(harrisim, wid+1)
d1 = harris.get_descriptors(im1, filtered_coords1, wid)
harrisim = harris.compute_harris_response(im2, 5)
filtered_coords2 = harris.get_harris_points(harrisim, wid+1)
d2 = harris.get_descriptors(im2, filtered_coords2, wid)
print 'starting matching'
matches = harris.match_twosided(d1, d2)
figure()
gray()
harris.plot_matches(im1, im2, filtered_coords1, filtered_coords2, matches)
show()
运行上面代码,可得下图:
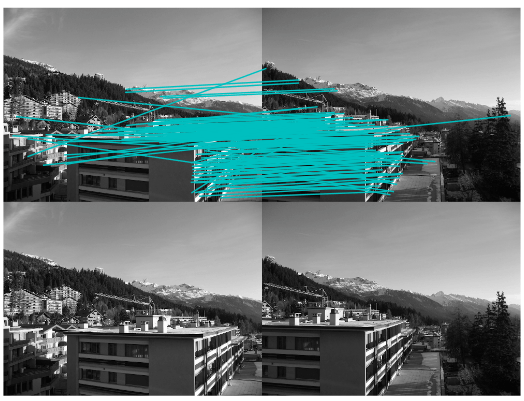 正如你从上图所看到的,这里有很多错配的。近年来,提高特征描述点检测与描述有了很大的发展,在下一节我们会看这其中最好的算法之一——SIFT。
正如你从上图所看到的,这里有很多错配的。近年来,提高特征描述点检测与描述有了很大的发展,在下一节我们会看这其中最好的算法之一——SIFT。
2.2 sift描述子
在过去的十年间,最成功的图像局部描述子之一是尺度不变特征变换(SIFT),它是由David Lowe发明的。SIFT在2004年由Lowe完善并经受住了时间的考验。关于SIFT原理的详细介绍,可以参阅中译本,在WIKI上你可以看一个简要的概览。
2.2.1 兴趣点
2.2.2 描述子
2.2.3 检测感兴趣点
为了计算图像的SIFT特征,我们用开源工具包VLFeat。用Python重新实现SIFT特征提取的全过程不会很高效,而且也超出了本书的范围。VLFeat可以在www.vlfeat.org上下载,它的二进制文件可以用于一些主要的平台。这个库是用C写的,不过我们可以利用它的命令行接口。此外,它还有Matlab接口。下面代码是再现原书P40页的代码:
# -*- coding: utf-8 -*-
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
from PCV.localdescriptors import harris
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
imname = '../data/empire.jpg'
im = array(Image.open(imname).convert('L'))
sift.process_image(imname, 'empire.sift')
l1, d1 = sift.read_features_from_file('empire.sift')
figure()
gray()
subplot(131)
sift.plot_features(im, l1, circle=False)
title(u'SIFT特征',fontproperties=font)
subplot(132)
sift.plot_features(im, l1, circle=True)
title(u'用圆圈表示SIFT特征尺度',fontproperties=font)
# 检测harris角点
harrisim = harris.compute_harris_response(im)
subplot(133)
filtered_coords = harris.get_harris_points(harrisim, 6, 0.1)
imshow(im)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
title(u'Harris角点',fontproperties=font)
show()
运行上面代码,可得下图:
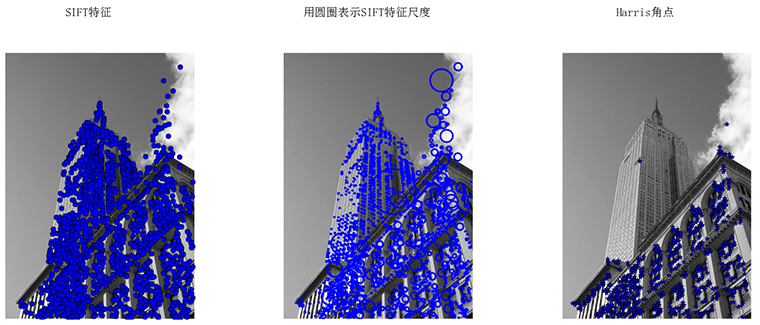 为了将sift和Harris角点进行比较,将Harris角点检测的显示在了图像的最后侧。正如你所看到的,这两种算法选择了不同的坐标。
为了将sift和Harris角点进行比较,将Harris角点检测的显示在了图像的最后侧。正如你所看到的,这两种算法选择了不同的坐标。
2.2.4 描述子匹配
from PIL import Image
from pylab import *
import sys
from PCV.localdescriptors import sift
if len(sys.argv) >= 3:
im1f, im2f = sys.argv[1], sys.argv[2]
else:
# im1f = '../data/sf_view1.jpg'
# im2f = '../data/sf_view2.jpg'
im1f = '../data/crans_1_small.jpg'
im2f = '../data/crans_2_small.jpg'
# im1f = '../data/climbing_1_small.jpg'
# im2f = '../data/climbing_2_small.jpg'
im1 = array(Image.open(im1f))
im2 = array(Image.open(im2f))
sift.process_image(im1f, 'out_sift_1.txt')
l1, d1 = sift.read_features_from_file('out_sift_1.txt')
figure()
gray()
subplot(121)
sift.plot_features(im1, l1, circle=False)
sift.process_image(im2f, 'out_sift_2.txt')
l2, d2 = sift.read_features_from_file('out_sift_2.txt')
subplot(122)
sift.plot_features(im2, l2, circle=False)
#matches = sift.match(d1, d2)
matches = sift.match_twosided(d1, d2)
print '{} matches'.format(len(matches.nonzero()[0]))
figure()
gray()
sift.plot_matches(im1, im2, l1, l2, matches, show_below=True)
show()
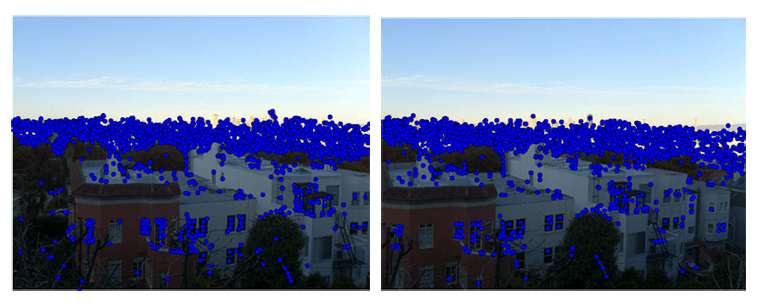
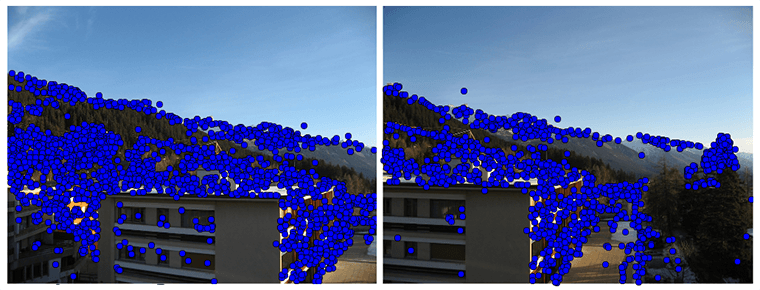
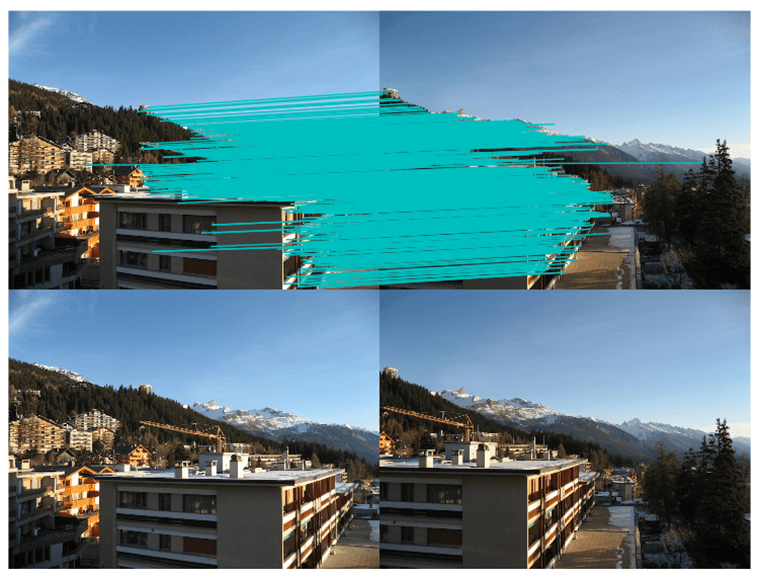
运行上面代码,可得下图:

2.3 地理标记图像匹配
在结束本章前,我们看一个用局部描述子对地理标记图像进行匹配的例子。
2.3.1 从Panoramio下载地理标记图像
利用谷歌的图片分享服务Panoramio,可以下载地理标记图像。像很多其他的web服务一样,Panoramio提供了API接口,通过提交HTTP GET请求url:
http://www.panoramio.com/map/get_panoramas.php?order=popularity&set=public&
from=0&to=20&minx=-180&miny=-90&maxx=180&maxy=90&size=medium
上面minx、miny、maxx、maxy定义了获取照片的地理区域。下面代码是获取白宫地理区域的照片实例:
# -*- coding: utf-8 -*-
import json
import os
import urllib
import urlparse
from PCV.tools.imtools import get_imlist
from pylab import *
from PIL import Image
#change the longitude and latitude here
#here is the longitude and latitude for Oriental Pearl
minx = '-77.037564'
maxx = '-77.035564'
miny = '38.896662'
maxy = '38.898662'
#number of photos
numfrom = '0'
numto = '20'
url = 'http://www.panoramio.com/map/get_panoramas.php?order=popularity&set=public&from=' + numfrom + '&to=' + numto + '&minx=' + minx + '&miny=' + miny + '&maxx=' + maxx + '&maxy=' + maxy + '&size=medium'
#this is the url configured for downloading whitehouse photos. Uncomment this, run and see.
#url = 'http://www.panoramio.com/map/get_panoramas.php?order=popularity&\
#set=public&from=0&to=20&minx=-77.037564&miny=38.896662&\
#maxx=-77.035564&maxy=38.898662&size=medium'
c = urllib.urlopen(url)
j = json.loads(c.read())
imurls = []
for im in j['photos']:
imurls.append(im['photo_file_url'])
for url in imurls:
image = urllib.URLopener()
image.retrieve(url, os.path.basename(urlparse.urlparse(url).path))
print 'downloading:', url
#显示下载到的20幅图像
figure()
gray()
filelist = get_imlist('./')
for i, imlist in enumerate(filelist):
im=Image.open(imlist)
subplot(4,5,i+1)
imshow(im)
axis('off')
show()
译者稍微修改了原书的代码,上面numto是设置下载照片的数目。运行上面代码可在脚本所在的目录下得到下载到的20张图片,代码后面部分为译者所加,用于显示下载到的20幅图像:
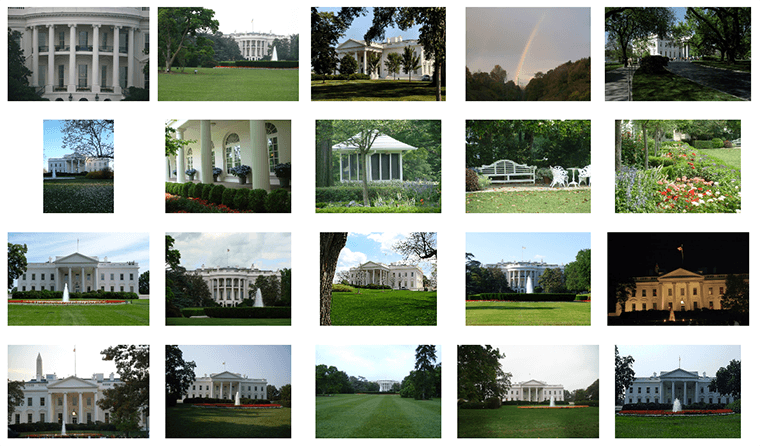 现在我们便可以用这些图片利用局部特征对其进行匹配了。
现在我们便可以用这些图片利用局部特征对其进行匹配了。
2.3.2 用局部描述子进行匹配
在下载完上面的图片后,我们便可提取他们的描述子。这里,我们用前面用到的SIFT描述子。
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import sift
from PCV.tools import imtools
import pydot
""" This is the example graph illustration of matching images from Figure 2-10.
To download the images, see ch2_download_panoramio.py."""
#download_path = "panoimages" # set this to the path where you downloaded the panoramio images
#path = "/FULLPATH/panoimages/" # path to save thumbnails (pydot needs the full system path)
download_path = "F:/dropbox/Dropbox/translation/pcv-notebook/data/panoimages" # set this to the path where you downloaded the panoramio images
path = "F:/dropbox/Dropbox/translation/pcv-notebook/data/panoimages/" # path to save thumbnails (pydot needs the full system path)
# list of downloaded filenames
imlist = imtools.get_imlist(download_path)
nbr_images = len(imlist)
# extract features
featlist = [imname[:-3] + 'sift' for imname in imlist]
for i, imname in enumerate(imlist):
sift.process_image(imname, featlist[i])
matchscores = zeros((nbr_images, nbr_images))
for i in range(nbr_images):
for j in range(i, nbr_images): # only compute upper triangle
print 'comparing ', imlist[i], imlist[j]
l1, d1 = sift.read_features_from_file(featlist[i])
l2, d2 = sift.read_features_from_file(featlist[j])
matches = sift.match_twosided(d1, d2)
nbr_matches = sum(matches > 0)
print 'number of matches = ', nbr_matches
matchscores[i, j] = nbr_matches
print "The match scores is: \n", matchscores
# copy values
for i in range(nbr_images):
for j in range(i + 1, nbr_images): # no need to copy diagonal
matchscores[j, i] = matchscores[i, j]
上面将两两进行特征匹配后的匹配数保存在matchscores中,最后一部分将矩阵填充完整,它并不是必须的,原因是该“距离度量”矩阵是对称的。运行上面代码,可得到下面的结果:
662 0 0 2 0 0 0 0 1 0 0 1 2 0 3 0 19 1 0 2
0 901 0 1 0 0 0 1 1 0 0 1 0 0 0 0 0 0 1 2
0 0 266 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
2 1 0 1481 0 0 2 2 0 0 0 2 2 0 0 0 2 3 2 0
0 0 0 0 1748 0 0 1 0 0 0 0 0 2 0 0 0 0 0 1
0 0 0 0 0 1747 0 0 1 0 0 0 0 0 0 0 0 1 1 0
0 0 0 2 0 0 555 0 0 0 1 4 4 0 2 0 0 5 1 0
0 1 0 2 1 0 0 2206 0 0 0 1 0 0 1 0 2 0 1 1
1 1 0 0 0 1 0 0 629 0 0 0 0 0 0 0 1 0 0 20
0 0 0 0 0 0 0 0 0 829 0 0 1 0 0 0 0 0 0 2
0 0 0 0 0 0 1 0 0 0 1025 0 0 0 0 0 1 1 1 0
1 1 0 2 0 0 4 1 0 0 0 528 5 2 15 0 3 6 0 0
2 0 0 2 0 0 4 0 0 1 0 5 736 1 4 0 3 37 1 0
0 0 1 0 2 0 0 0 0 0 0 2 1 620 1 0 0 1 0 0
3 0 0 0 0 0 2 1 0 0 0 15 4 1 553 0 6 9 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2273 0 1 0 0
19 0 0 2 0 0 0 2 1 0 1 3 3 0 6 0 542 0 0 0
1 0 0 3 0 1 5 0 0 0 1 6 37 1 9 1 0 527 3 0
0 1 0 2 0 1 1 1 0 0 1 0 1 0 1 0 0 3 1139 0
2 2 0 0 1 0 0 1 20 2 0 0 0 0 0 0 0 0 0 499
注意:这里译者为排版美观起见,用的是原书运行的结果,上面代码时间运行的结果跟原书得到的结果是有差异的。
2.3.3 可视化接连的图片
这节我们对上面匹配后的图像进行连接可视化,要做到这样,我们需要在一个图中用边线表示它们之间是相连的。我们采用pydot工具包,它提供了GraphViz graphing库的Python接口。不要担心,它们安装起来很容易。
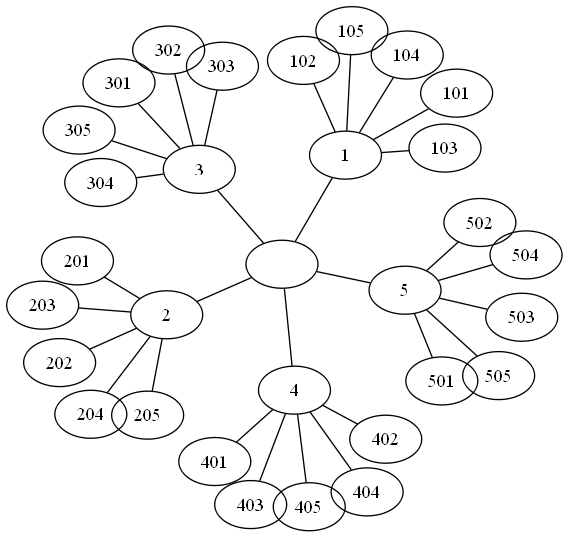
Pydot很容易使用,下面代码演示创建一个图:
import pydot
g = pydot.Dot(graph_type='graph')
g.add_node(pydot.Node(str(0), fontcolor='transparent'))
for i in range(5):
g.add_node(pydot.Node(str(i + 1)))
g.add_edge(pydot.Edge(str(0), str(i + 1)))
for j in range(5):
g.add_node(pydot.Node(str(j + 1) + '0' + str(i + 1)))
g.add_edge(pydot.Edge(str(j + 1) + '0' + str(i + 1), str(j + 1)))
g.write_png('../images/ch02/ch02_fig2-9_graph.png', prog='neato')
运行上面代码,在images/ch02/下生成一幅名字为ch02fig2-9graph的图,如下所示:
 现在,我们回到那个地理图像的例子,我们同样将匹配后对其进行可视化。为了是得到的可视化结果比较好看,我们对每幅图像用100*100的缩略图缩放它们。
现在,我们回到那个地理图像的例子,我们同样将匹配后对其进行可视化。为了是得到的可视化结果比较好看,我们对每幅图像用100*100的缩略图缩放它们。
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import sift
from PCV.tools import imtools
import pydot
""" This is the example graph illustration of matching images from Figure 2-10.
To download the images, see ch2_download_panoramio.py."""
#download_path = "panoimages" # set this to the path where you downloaded the panoramio images
#path = "/FULLPATH/panoimages/" # path to save thumbnails (pydot needs the full system path)
download_path = "F:/dropbox/Dropbox/translation/pcv-notebook/data/panoimages" # set this to the path where you downloaded the panoramio images
path = "F:/dropbox/Dropbox/translation/pcv-notebook/data/panoimages/" # path to save thumbnails (pydot needs the full system path)
# list of downloaded filenames
imlist = imtools.get_imlist(download_path)
nbr_images = len(imlist)
# extract features
featlist = [imname[:-3] + 'sift' for imname in imlist]
for i, imname in enumerate(imlist):
sift.process_image(imname, featlist[i])
matchscores = zeros((nbr_images, nbr_images))
for i in range(nbr_images):
for j in range(i, nbr_images): # only compute upper triangle
print 'comparing ', imlist[i], imlist[j]
l1, d1 = sift.read_features_from_file(featlist[i])
l2, d2 = sift.read_features_from_file(featlist[j])
matches = sift.match_twosided(d1, d2)
nbr_matches = sum(matches > 0)
print 'number of matches = ', nbr_matches
matchscores[i, j] = nbr_matches
print "The match scores is: \n", matchscores
# copy values
for i in range(nbr_images):
for j in range(i + 1, nbr_images): # no need to copy diagonal
matchscores[j, i] = matchscores[i, j]
#可视化
threshold = 2 # min number of matches needed to create link
g = pydot.Dot(graph_type='graph') # don't want the default directed graph
for i in range(nbr_images):
for j in range(i + 1, nbr_images):
if matchscores[i, j] > threshold:
# first image in pair
im = Image.open(imlist[i])
im.thumbnail((100, 100))
filename = path + str(i) + '.png'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(i), fontcolor='transparent', shape='rectangle', image=filename))
# second image in pair
im = Image.open(imlist[j])
im.thumbnail((100, 100))
filename = path + str(j) + '.png'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(j), fontcolor='transparent', shape='rectangle', image=filename))
g.add_edge(pydot.Edge(str(i), str(j)))
g.write_png('whitehouse.png')
运行上面代码,可以得到下面的结果:
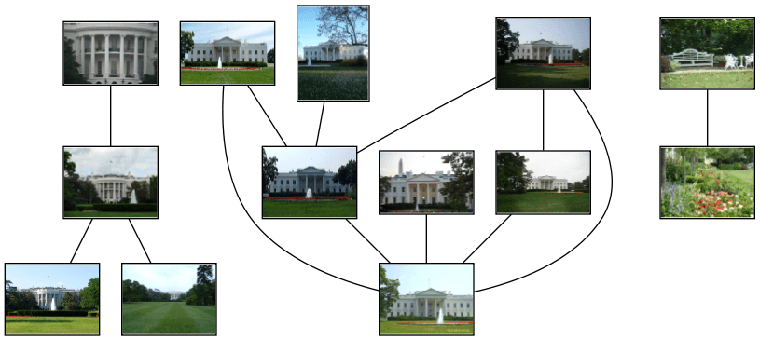 正如上图所示,我们可以看到三组图像,前两组是白宫不同的侧面图片。上面这个例子只是一个利用局部描述子进行匹配的很简单的例子,我们并没有对匹配进行核实,在后面两个章节中,我们便可以对其进行核实了。
正如上图所示,我们可以看到三组图像,前两组是白宫不同的侧面图片。上面这个例子只是一个利用局部描述子进行匹配的很简单的例子,我们并没有对匹配进行核实,在后面两个章节中,我们便可以对其进行核实了。